

Développement d’une charge utile pour drone volcanique
Dans le cadre d’un projet mené au Département des sciences de la Terre de l’Université de Genève, nous développons une charge utile destinée à être embarquée sur un drone pour l’étude de panaches volcaniques.
Le projet se développe en trois grandes étapes :
- La première consiste à sélectionner l’électronique embarquée, puis à tester un prototype sur breadboard afin de programmer, vérifier et calibrer les différents capteurs.
- La deuxième étape porte sur la modélisation et la fabrication d’une coque compacte et légère, capable de s’arrimer au drone tout en accueillant les composants électroniques.
- La troisième étape concernera l’assemblage final, l’intégration de l’électronique dans la coque et les derniers réglages avant les essais en conditions réelles.
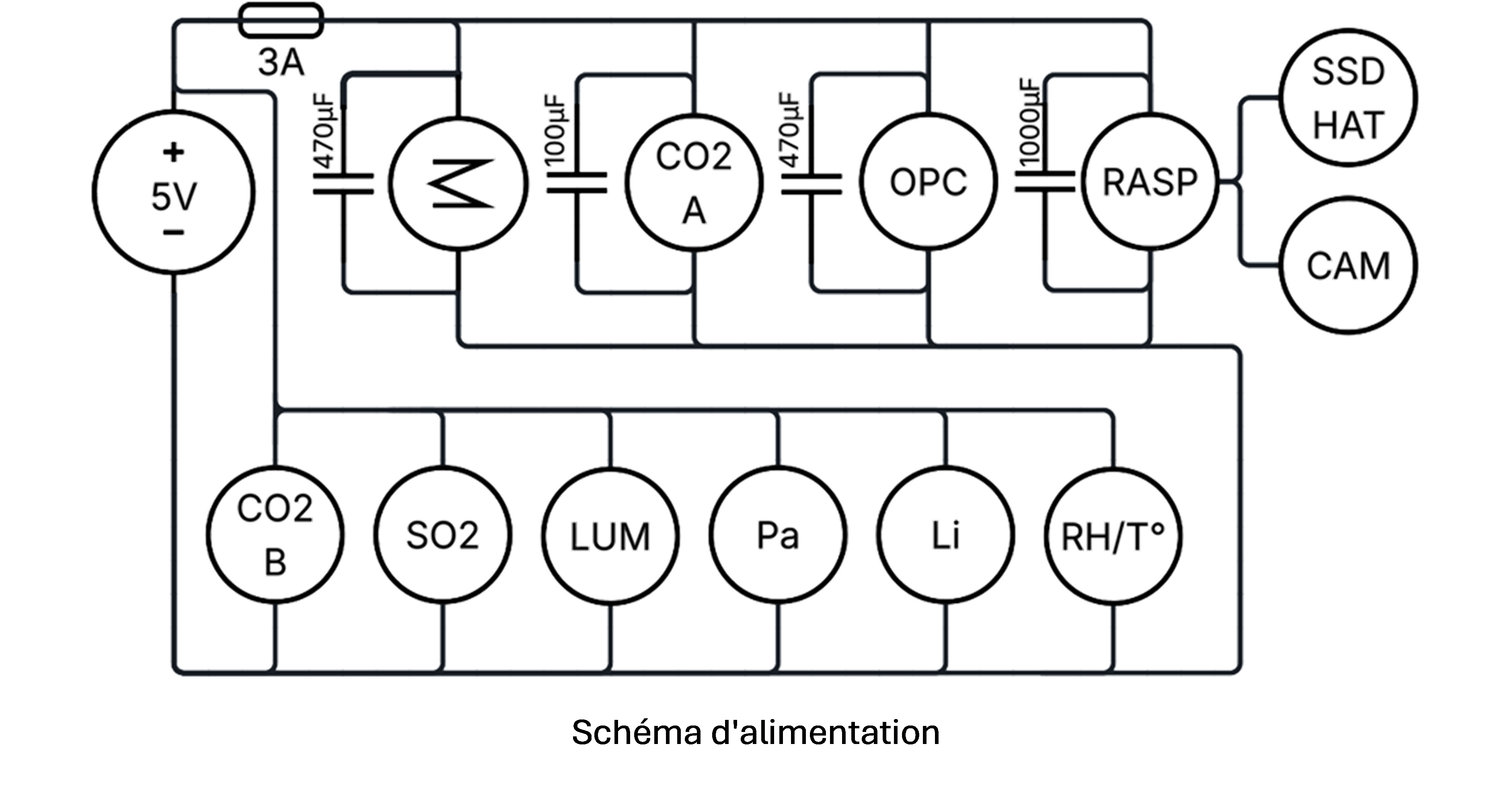
M : Servomoteur
RASP : Raspberry Pi
SSD HAT : Module HAT pour SSD
CAM : Caméra
CO₂ A&B : Capteurs de dioxyde de carbone
OPC : Compteur optique de particules
SO₂ : Capteur de dioxyde de soufre
LUM : Capteur de luminosité
Pa : Capteur de pression atmosphérique
Li : Capteur d’éclairs
RH/T° : Capteur d’humidité et de température
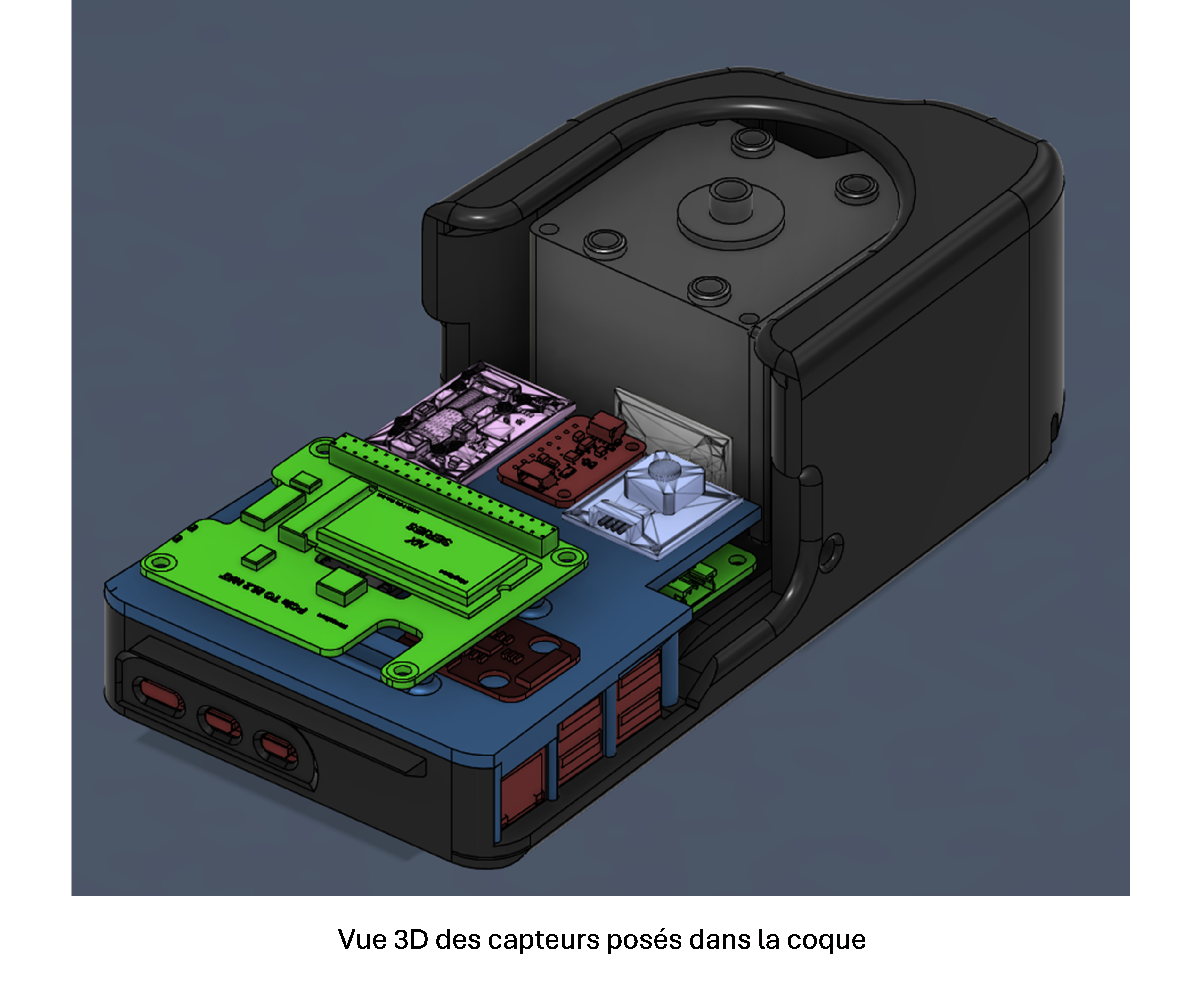
Le cœur du système est un Raspberry Pi (dont on voit juste les connecteurs dépasser sous le support bleu dans la figure 2), qui sert à piloter les capteurs et à enregistrer les données. Plusieurs capteurs ont été intégrés dans le but de mesurer de façon synchronisée plusieurs phénomènes naturels : les concentrations en CO₂ et en SO₂, la température, l’humidité, la pression atmosphérique, les décharges électriques provoquées par les éclairs dans les panaches volcaniques, ainsi que la concentration, la taille et la masse des particules en suspension.
En plus de ces mesures, un système d’échantillonnage des cendres volcaniques est installé avec une mini-caméra pour pouvoir étudier en laboratoire les caractéristiques des particules émises dans l’atmosphère lors d’éruptions volcaniques.

Le boîtier a été modélisé en tenant compte de nombreuses contraintes : le poids, la solidité, le système de fixation au drone, la circulation de l’air, le passage des câbles, l’accès à la caméra, le refroidissement, pour ne citer que quelques exemples. L’enjeu était de concevoir une structure adaptée aux besoins du projet, à la fois fonctionnelle, légère et imprimable.
L’accompagnement du FacLab a joué un rôle important dans le passage du modèle numérique à un premier prototype imprimé en 3D. Cette étape permet de tester concrètement la conception de la charge utile, en vérifiant les dimensions, l’assemblage des différentes pièces, les tolérances, l’orientation d’impression et les ajustements nécessaires avant la fabrication de la coque finale.

Le projet en est actuellement à sa deuxième étape : impression 3D, montage et ajustements.
De futures publications suivront l’avancement du projet, notamment l’impression de la coque finale, les tests électroniques et les premiers essais en conditions réelles.